





















Please Leave Us A Message
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.

Shenzhen Kingsom Technology Co., Ltd.
ブランド: キングサム
包装: カートン木製
生産高: 10000sets/year
輸送方法: Ocean
原産地: 深セン
についてのサポート: Strong
認証 : CE,CCC,ROHS and ISO9001:2008
ポート: Shenzhen Port
お支払い方法の種類: L/C,T/T,Paypal,Money Gram,Western Union
インコタームズ: FOB,EXW
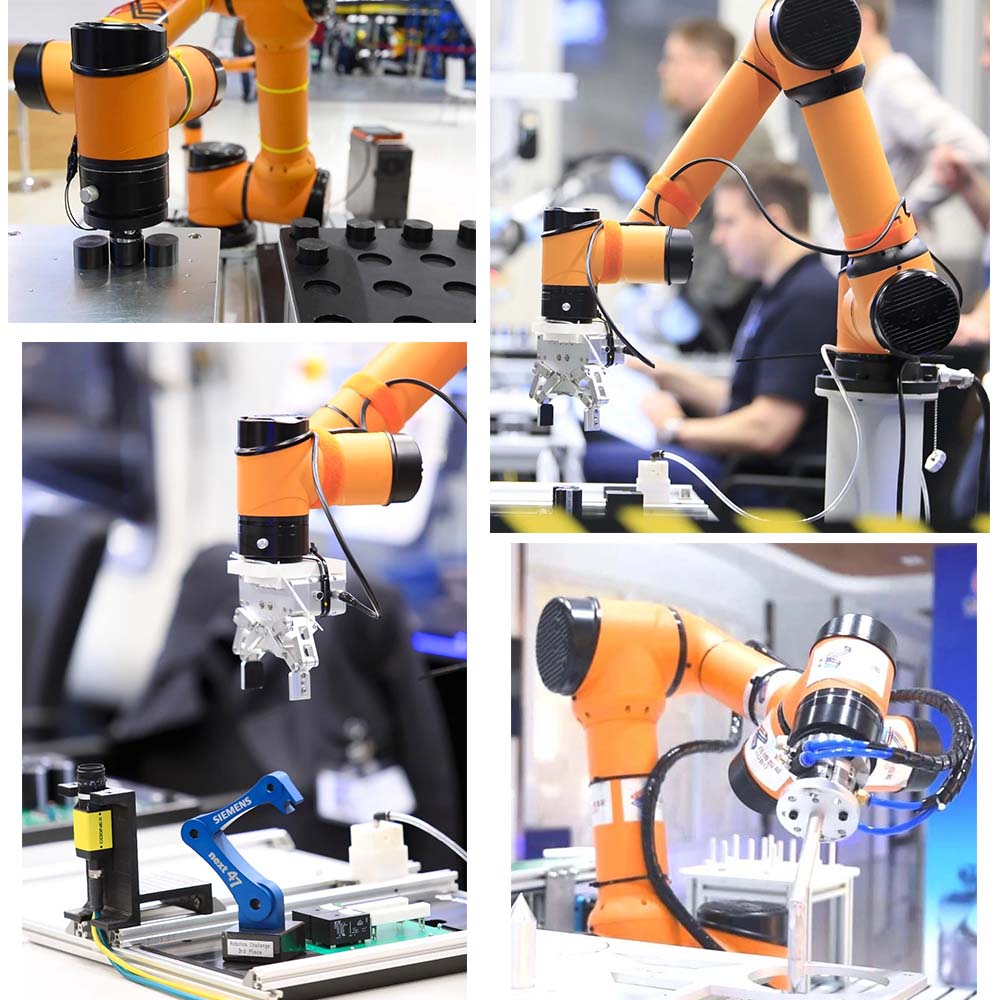
自動化システム用6軸マニピュレーター
鍛造マニピュレータは、実行システム、駆動システム、制御システムの3つの部分で構成されています。実行システムは通常、手、手首、腕、体、およびいくつかの追加の歩行メカニズムで構成されています。駆動システムは、駆動要素と伝達機構で構成されています。一般的に使用される形式には、油圧トランスミッション、空気圧トランスミッション、電子トランスミッション、機械式トランスミッションの4つがあります。制御システムは、制御装置と検出装置で構成されています。一般的には、所定のプログラムに従ってマニピュレータが動くように制御し、必要に応じてマニピュレータの動きを監視する電気制御が使用されます。アクションにエラーまたは誤動作がある場合、調整またはアラーム信号のために制御システムにフィードバックすることができます。
インテリジェンス
1.ビジョンシステムはコントローラーに統合できます。
2.ファームウェアのリモートメンテナンス、故障診断、オンラインアップグレードを実現するクラウドプラットフォーム管理に基づくソフトウェアシステム。
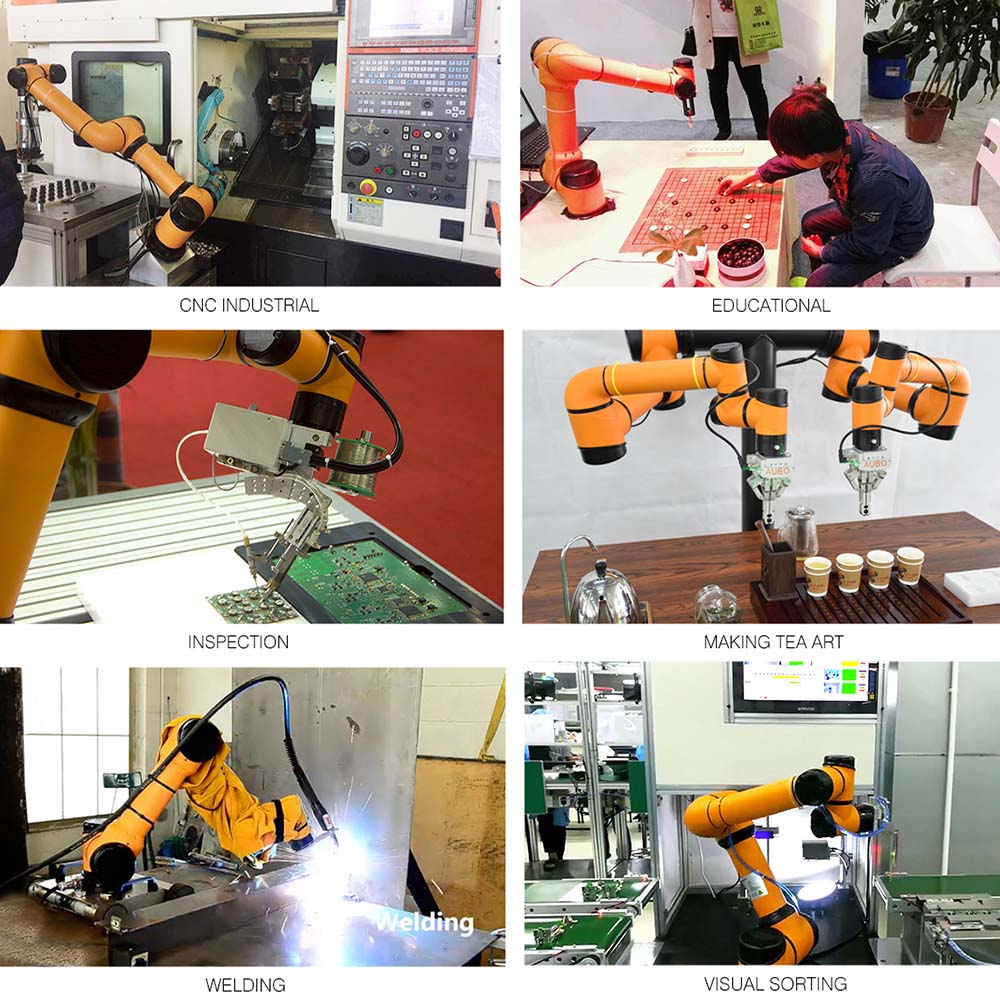
3.この研究用ロボットプラットフォームは、世界中の企業の研究室や学術的なロボット工学の研究に広く使用されています。
モジュール設計
1.ロボットは、ユーザーの要件を満たすために4〜7自由度を持つように構成できます。
2.ジョイントの長さは、より長いリンクまたはより短いリンクにカスタマイズできます。
ロボットアーム機のほか、はんだヒューム抽出器、はんだペーストディスペンサー、空気圧式ハンドヘルドスクリューフィーダー、自動スクリューフィーダーなど、多くの製品を取り揃えております。これらの製品が必要な場合は、お問い合わせください。できるだけ早く返信いたします。
技術仕様
| Controlled Axed DoF | 6 axes (J1, J2, J3, J4, J5, J6) J7max |
| Reach | 924 mm |
| Working Range | 880 mm |
| Payload | 5kg |
| Weight | 24kg |
| Footprint | 172 mm diameter |
| Collabortative Operation |
Safety monitored stop, speed and separation monitoring, hand guid operation, power and force limiting design. |
| Certifications |
ISO 10218-1:2011, EN 60204-1:2006 +A1:2009 ISO 12100:2010, ISO 13849-1:2008, CE |
| Repeatability | ±0.02mm |
| Linear Velocity | 2.8 m/s adjustable |
| Power Consumption | 200 watts typical application |
| Materials | Aluminum, Steel, Plastic |
| Ambient Humidity | Normal 75% RH or less without frost, or dew, 85% RH short term |
| Ambient Temperature | 0 to 45 degrees Celsius |
| IP Classification of Robot | IP 54 |
| Programing |
Teach Pendant with user interface, guide to teach, ROS compatibility through an API, Lua, Python. |
| Communication | CAN Bus |
| Motor Type | Harmonic drive 48 Volt |
| Installation Orientation | Any celling, Floor, Wall |




| Axis | Working Range | MAximun Speed | Max Joint Moments |
| J1 axis rotation base | (+/-)175° | 150°/sec | 207Nm |
| J2 axis rotation shoulder | (+/-)175° | 150°/sec | 207Nm |
| J3 axis rotation elbow | (+/-)175° | 150°/sec | 207Nm |
| J4 axis wrist rotation | (+/-)175° | 180°/sec | 34Nm |
| J5 axis wrist swing | (+/-)175° | 180°/sec | 34Nm |
| J6 axis wrist rotation | (+/-)175° | 180°/sec | 34Nm |

| Dimensions (LxWxH) | 683x220x622 mm | I/O Ports | User I/O | Safety I/O | |
| Weight | 20kg | Digital in | 16 | 16 | |
| Cabling | 5m | Digital Out | 16 | 16 | |
| Colour | Black | Analog in | 4 | - | |
| Communication | TCP/IP, Modbus-RTU/TCP | Analog out | 4 | - | |
| Power supply | 100-240 VAC, 50-60Hz | Power input | 24 Volts | ||
| IP Classification | IP54 | Power output | 3A | ||


製品グループ : ロボットアームマシン > Kingsom新着産業用鍛造マニピュレーターロボットアーム




Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
Fill in more information so that we can get in touch with you faster
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.